3DMADMAC|AUTO
Automated System for 3D Digitization of Polish and European Cultural Heritage Objects (2007-2010)
built at Warsaw University of Technology, Faculty of Mechatronics by OGX research group
Project financed by Polish Ministry of Science and Higher Education
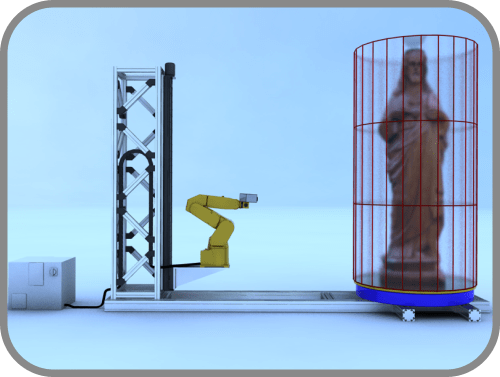
The main aim of the project was to develop an automated system and methodology for 3D digitization of objects representing Polish, European and World cultural heritage. The developed system uses an optical full-field method of measurement with raster projection (so-called structured light method) and produces results in the form of a point cloud (x, y, z, R, G, B) which represents the sampled surface of an object. 3D Digitization of an entire work of art (by multiple directional measurements) is performed automatically with a robotized system, which allows to position the measurement head arbitrarily within the working volume. Additionaly, many algorithms for data processing have been developed, none of them requiring any user interaction, which can lead to a close (eternal) copy of an object (highest precision of surface and color representation), a simplified copy for visualization purposes (with customizable precision of representation) or a copy for 3D printing. The developed system utilizes a database system for storing measurement results. Finally, a remote player for viewing digitized objects and their descripitions (retrieved from database) was implemented.

Works of art digitized during the project.
Parameters of measurement system:
Measurement head:
- working volume: from 30mm x 20mm x 12mm to 600mm x 400mm x 300mm;
- measurement uncertainty: from 5µm to 50µm;
- time of measurement: from 5s to 30s;
- management: direct (keyboard and mouse) or remote (via network).
System parameters:
- working volume: 2.5m x 1m x 1m;
- maximum object’s weight: 2000kg;
- vertical column’s range: 1520mm;
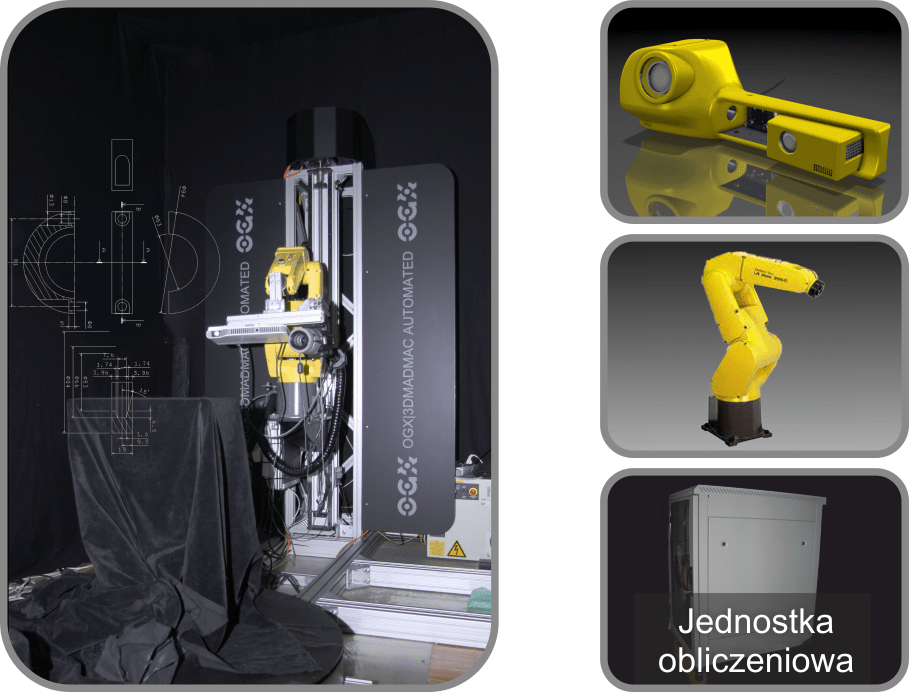
- robot used: FANUC LR Mate 200ic, maximum movement range: 704mm;
- collision detection: two-step software based (during calculations of measurement head’s movement trajectory) and realtime, machine-vision based (during measurements and positioning of scanning device);
- processing unit: PC computer, 24GB RAM, Intel Core i7 980x,12TB RAID6 storage.
Download leaflet (pdf 847KB):