3DMADMAC|AUTO
Zautomatyzowany system do trójwymiarowej digitalizacji obiektów polskiego i europejskiego dziedzictwa kulturowego
zrealizowany przez Politechnikę Warszawską, Wydział Mechatroniki, grupę badawczą OGX
(projekt rozwojowy finansowany przez Ministerstwo Nauki i Szkolnictwa Wyższego).
Celem projektu było opracowanie systemu i metodyki do digitalizacji trójwymiarowej (3D) obiektów reprezentujących polskie, europejskie i światowe dziedzictwo kulturowe. System wykorzystuje optyczne bezkontaktowe metody polowe z cyfrową projekcją rastra (tzw. oświetlenie strukturalne). Wynikiem pomiaru są chmury punktów (x, y, z, R, G, B) reprezentujące powierzchnię mierzonego obiektu. Digitalizacja 3D całego obiektu z wielu kierunków jest realizowana automatycznie dzięki zastosowaniu zrobotyzowanego stanowiska umożliwiającego dowolne pozycjonowanie systemu pomiarowego względem obiektu. Dodatkowo opracowane i zaimplementowane zostały algorytmy do przetwarzania danych pomiarowych i tworzenia wirtualnej reprezentacji obiektu do: tworzenia dokumentacji muzealnej (tzw. kopii wieczystej – maksymalnie dokładne odwzorowanie geometrii i barwy obiektu), wizualizacji (w zależności od zastosowania z dobieraną dokładnością odwzorowania i jednocześnie rozmiarem pliku danych opisujących obiekt) oraz reprezentacji pozwalającej na wykonywanie rzeczywistej kopii obiektu w technologii druku 3D. System wyposażony został w bazę danych umożliwiającą składowanie zdigitalizowanych i przetworzonych obiektów wirtualnych. Dodatkowo został opracowany i zaimplementowany odtwarzacz umożliwiający zdalnie łączenie z bazą danych i po autoryzacji przeglądanie zawartości bazy w postaci opisu obiektów oraz wizualizacji trójwymiarowej geometrii.

Obiekty poddane procesowi digitalizacji 3D podczas realizacji projektu.
Parametry systemu pomiarowego:
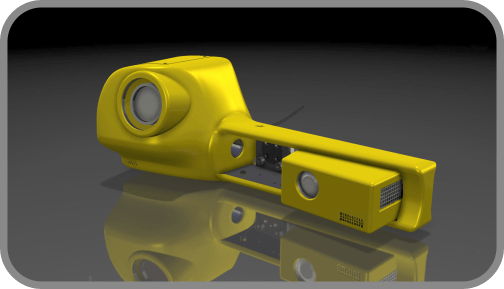
Głowica pomiarowa:
- objętość robocza: od 30 x 20 x 12 mm do 600mm x 400mm x 300mm;
- niepewność pomiaru: od 5μm do 50μm;
- czas pomiaru: od 5s do 30s;
- sterowanie i zarządzanie: bezpośrednio (klawiatura i mysz) lub zdalnie (przez Internet);
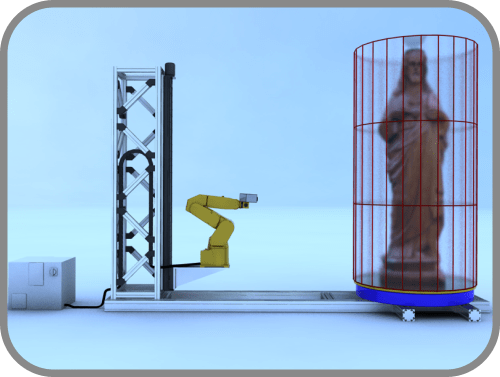
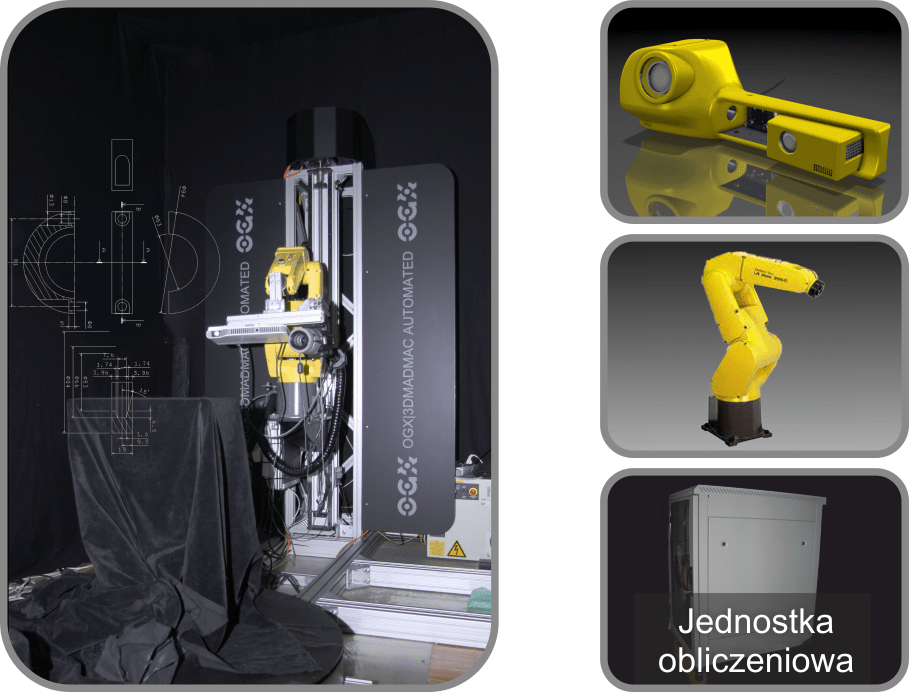
Parametry systemu pomiarowego:
- objętość robocza: 2,5x1x1 m ;
- nośność stolika obrotowego: 2 tony;
- zakres przesuwu kolumny pionowej: 1520mm;
- ramię robota: FANUC LR Mate 200ic, max. zakres ruchu 704mm;
- system detekcji kolizji: dwustopniowy programowy przy wyznaczaniu trajektorii ruchu głowicy pomiarowej, wizyjny (czasu rzeczywistego) w trakcie całego pomiaru i pozycjonowania;
- jednostka centralna: Intel Core i7 980x, 24GB RAM, macierz dyskowa
Ulotka do pobrania (pdf 1,6MB):