Wilanów RotLite
Multimodalna głowica pomiarowa do obrazowania geometrii 3D oraz kątowej i widmowej charakterystyki rozproszenia oraz barwy.
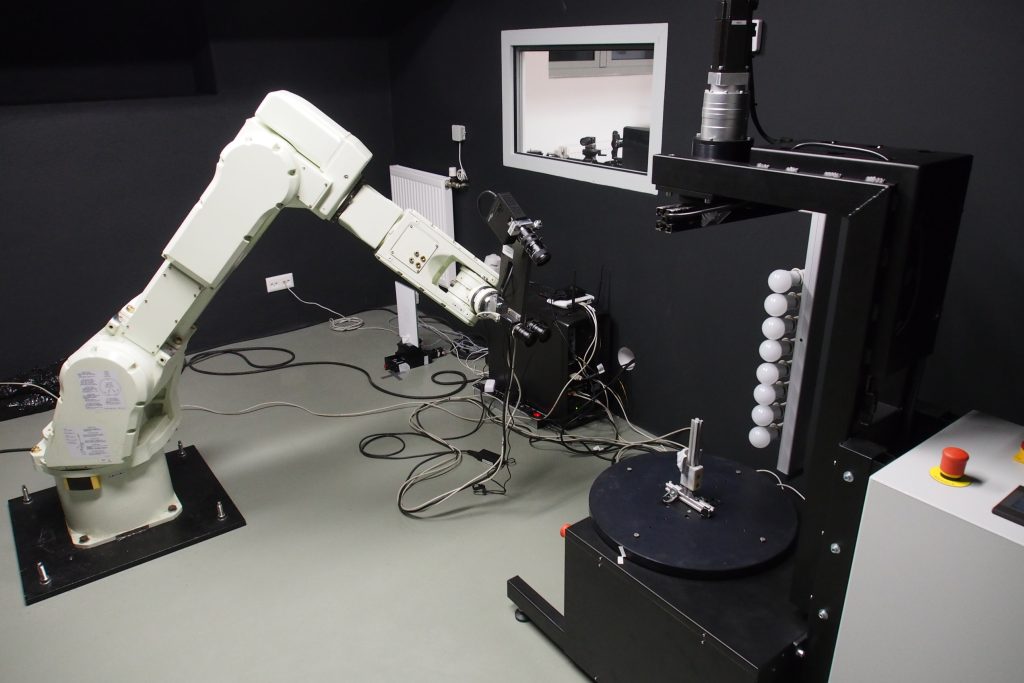
We współpracy z Muzeum Jana III Sobieskiego Pałac w Wilanowie w ramach projektu „Rewitalizacja i digitalizacja Wilanowa, jedynej barokowej rezydencji królewskiej w Polsce”, finansowanego z Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu Operacyjnego Infrastruktura i Środowisko na lata 2007 – 2013 opracowane zostało stanowisko do multimodalnego pomiaru parametrów powierzchni trójwymiarowej. Obejmuje ono głowicę skanera 3D, zamontowaną na ramieniu robota przemysłowego oraz stół obrotowy, na którym umieszcza się skanowany obiekt, wraz z ruchomym modułem przestrajalnych spektralnie oświetlaczy. Całość sterowana jest za pomocą komputera PC z dedykowanym oprogramowaniem opracowanym w Zakładzie Technik Rzeczywistości Wirtualnej PW.
Prezentowane stanowisko pomiarowe łączy w sobie trzy ścieżki pomiarowe, które rejestrują różne właściwości fizyczne powierzchni trójwymiarowej. Są to odpowiednio: geometria powierzchni, widmowa charakterystyka rozproszenia światła i barwa oraz kątowa charakterystyka rozproszenia opisywana tzw. funkcją BRDF (Bi-Directional Reflectance Distribution Function).
Metoda pomiaru geometrii trójwymiarowej opiera się na projekcji prążków sinusoidalnych i binarnych w świetle białym. Sekwencja obrazów prążkowych jest rejestrowana przez kamerę cyfrową, a następnie wykorzystywana do wyznaczenia tzw. chmury punktów, kóra reprezentuje trójwymiarowy kształt mierzonej powierzchni.

Pomiar widmowej charakterystyki rozproszenia polega na rejestracji zestawu obrazów w 6 – 10 kanałach spektralnych w zakresie widzialnym. Filtracja spektralna może odbywać się poprzez wykorzystanie przestrajalnego źródła światła lub zastosowaniu filtrów w torze optycznym kamery. Na podstawie zestawu obrazów, w każdym pikselu, można, niezależnie od charakterystyki źródła światła, znaleźć widmo, które jest rozpraszane przez badaną powierzchnię. Informacja ta pozwala na wyznaczenie barwy powierzchni postrzeganej przy dowolnym rodzaju oświetlenia. Ponadto obliczyć można ilościową różnicę między barwami.
Wyznaczenie kątowej charakterystyki rozproszenia wymaga natomiast zarejestrowania sekwencji zdjęć powierzchni, która oświetlona jest pod różnymi kątami. Na podstawie intensywności zarejestrowanej w każdym pikselu oświetlonym z różnych kierunków można wyznaczyć model matematyczny, który pokazuje ilość energii świetlnej rozpraszanej w zadanym kierunku na podstawie energii padającej w innym kierunku. W ten sposób oszacować można wygląd powierzchni w zależności od tego czy jest błyszcząca, czy matowa.
Prezentowane rozwiązanie wykorzystuje tą samą kamerę do zbierania zdjęć potrzebnych jako dane wejściowe dla wszystkich wymienionych metod. Umożliwia zatem wyznaczenie widmowej i kątowej charakterystyki powierzchni w każdym punkcie trójwymiarowej chmury.
Głównym zastosowaniem przedstawionego rozwiązania jest cyfrowa dokumentacja obiektów dziedzictwa kulturowego. Bogaty zestaw surowych danych pozwala na ich obróbkę pod kątem uzyskania różnorodnych informacji o mierzonym przedmiocie. Możliwości te są istotne zarówno z punktu widzenia konserwacji zabytków, jak i tworzenia ich dokumentacji oraz wizualizacji w środowisku wirtualnym.
Rejestracja zabytków za pomocą zintegrowanego systemu pomiarowego umożliwia:
- rozpoznawanie materiałów, z których wykonany jest przedmiot poprzez porównanie widmowej charakterystyki rozproszenia z krzywą wzorcową, charakterystyczną dla próbki pigmentu.
- monitorowanie procesu starzenia poprzez porównanie kształtu powierzchni zarejestrowanego w odstępach czasu. Na przykład w przypadku rzeźby narażonej na działanie czynników atmosferycznych pozwala to na oszacowanie szybkości degradacji powierzchni.
- rozpoznawanie autentyczności dzieła sztuki poprzez porównanie mikrogeometrii testowanej próbki powierzchni z wcześniej wykonanym pomiarem wzorcowym.
- symulację wyglądu w zadanych warunkach obserwacji, innych niż te, które występują na ekspozycji, w tym takich, które mogłyby być potencjalnie niebezpieczne dla niepogorszenia stanu obiektu. Zasymulować można na przykład wygląd obrazu olejnego w świetle dziennym, podczas gdy normalnie jest on eksponowany w mało intensywnym oświetleniu żarowym, ze względu na ryzyko uszkodzenia pigmentów przez promieniowanie ultrafioletowe. Ponadto informacja o kątowej charakterystyce rozproszenia pozwala na wizualizację w oświetleniu kierunkowym i obserwację refleksów światła na powierzchni podczas zmiany kierunku oświetlenia.
- wirtualną rekonstrukcję pierwotnego wyglądu zabytkowego przedmiotu, mimo że został on odnaleziony w stanie niekompletnym. Często niemożliwa jest ingerencja w wygląd obiektu ze względu na jego wartość zabytkową, ale jego rekonstrukcja może mieć istotny wymiar poznawczy lub edukacyjny. Jeżeli natomiast obiekt ulegnie uszkodzeniu mechanicznemu, np. poprzez oderwanie fragmentu, jego uprzedni skan może posłużyć konserwatorowi sztuki do odtworzenia pierwotnego wyglądu.
- kopiowanie zeskanowanego obiektu z wykorzystaniem technologii druku 3D do celów edukacyjnych, rekonstrukcyjnych lub promocyjnych.
Możliwości zastosowań prezentowanej technologii są szerokie, niosą jednak za sobą przeważnie konieczność opracowania dedykowanego oprogramowania do przetwarzania, analizy oraz wizualizacji danych końcowych. Ścieżka przetwarzania w każdym z powyższych zastosowań, jakkolwiek posiada wspólne elementy, powinna być dostosowana do konkretnego rozwiązania aby zapewnić rezultat optymalny dla końcowego użytkownika i wygodny w wykorzystaniu. Na operacje wykonywane na surowych danych pomiarowych składa się między innymi:
- filtracja, dopasowanie geometryczne i/lub uproszczenie danych geometrycznych oraz warunkowo zmiana reprezentacji powierzchni z chmury punktów na siatkę trójkątów;
- wyznaczenie obrazów z teksturą barwną, obliczoną na podstawie kalibracji spektralnej oraz generowane na żądanie rozkłady charakterystyk widmowych;
- znalezienie parametrów modelu funkcji BRDF;
- wyznaczenie danych statystycznych i parametrycznych opisujących badany obiekt na potrzeby konkretnego zastosowania.
W ogólnym przypadku do wyświetlenia końcowych wyników pomiaru konieczne jest dedykowane oprogramowanie umożliwiające wizualizację danych trójwymiarowych, wraz z informacją o barwie, a także symulujące warunki oświetlenia w wirtualnej scenie. Możliwy jest jednak eksport danych do formatu wspieranego przez komercyjne oprogramowanie do obróbki danych 3D, takie jak np. 3D Studio Max, Blender, a także eksport do formatu wspieranego przez oprogramowanie do zarządzania drukiem trójwymiarowym.Parametry systemu pomiarowego :
| Parametr | Wartość |
| maks. rozmiar skanowanego obiektu (dł., szer. wys.) | 300 x 300 x 500 mm |
| maks. masa skanowanego obiektu | 50kg |
| rozdzielczość pomiaru geometrii powierzchni | 40 punktów/mm |
| niepewność pomiaru geometrii powierzchni | 0.05mm |
| zakres spektralny pomiaru charakterystyki widmowej | 400 – 700nm |
| rozdzielczość pomiaru charakterystyki widmowej | 5nm |
| niepewność pomiaru charakterystyki widmowej | 5% zakresu, w stosunku do referencyjnego spektrofotometru |
| format wyniku pomiaru barwy | CIE XYZ, CIE LAB, sRGB |
| min. odległość między obiektem a głowicą pomiarową | 550mm |
| objętość pojedynczego pomiaru | 60 x 80 x 40 mm |
| czas pojedynczego pomiaru geometrii | 15s |
| czas pojedynczego pomiaru charakterystyki rozproszenia | 300s (średnio – zależy od liczby kierunków) |
| całkowity czas pomiaru obiektu | 8 – 48h (w zależności od wiekości i kształtu obiektu) |