Wilanów Gabinet
Zrobotyzowane stanowisko do pomiaru geometrii powierzchni Gabinetu Chińskiego w Muzeum Pałacu Króla Jana III w Wilanowie.
Cel projektu
Celem projektu było wykonanie skanu 3D powierzchni ścian i sufitu zabytkowego Gabinetu Króla Chińskiego w Muzeum Pałacu Króla Jana III w Wilanowie. Wymaganą rozdzielczość i dokładność ustalono na wysokim poziomie 100 punktów na milimetr kwadratowy przy dokładności 30um. Tak wysoka dokładność implikuje stosowanie metody skanowania projekcją światła strukturalnego przy ograniczonej objętości pomiarowej. Przy wymiarach skanowanego pomieszczenia 4x4x5 metrów, powierzchni skanowania wynoszącej ponad 100 metrów kwadratowych, musimy wykonać tysiące skanów. Pozyskanie i zarządzanie tak dużą ilością danych, dopasowanie skanów i zbudowanie ostatecznego modelu 3D było dużym wyzwaniem.
Pomysł na układ pomiarowy
Aby efektywnie digitalizować zabytkowe wnętrza, system Kings Chinese Cabinet musi spełniać kilka wymagań. Po pierwsze, przy konieczności wykonywania tysięcy pozycji, głowica pomiarowa powinna być pozycjonowana automatycznie. Znacząco przyspieszy to etap akwizycji danych. Po drugie, skany należy z grubsza wyrównać tuż po przejęciu. Kolejnym wyzwaniem był fakt, że pomieszczenie ma ponad 5 metrów wysokości. Odległość głowicy skanera od objętości pomiarowej wynosi ok. 75cm, co oznacza, że musimy podnieść głowicę pomiarową na wysokość 5 metrów nad ziemię, aby uchwycić najwyższe partie pomieszczenia. Całość konstrukcji powinna być stabilna, sztywna i bezpieczna. Zmierzone obiekty są bezcenne, nie ma miejsca na błędy. Zastosowany system składa się z napędzanej silnikiem kolumny pionowej wraz z ramieniem robota (Fanuc LRMate 200i o zakresie 700 mm), podtrzymującym głowicę pomiarową 3D. Kolumna umieszczona jest na platformie kołowej, co umożliwia swobodne przemieszczanie konstrukcji wewnątrz Gabinetu. Kolumna pionowa jest wystarczająco wysoka, aby dosięgnąć najwyższych części sufitu szafy. Wreszcie cała konstrukcja powinna być stabilna, sztywna i bezpieczna. Zmierzone obiekty są bezcenne, nie ma miejsca na błędy.

Rys. Układ pomiarowy – koncepcja
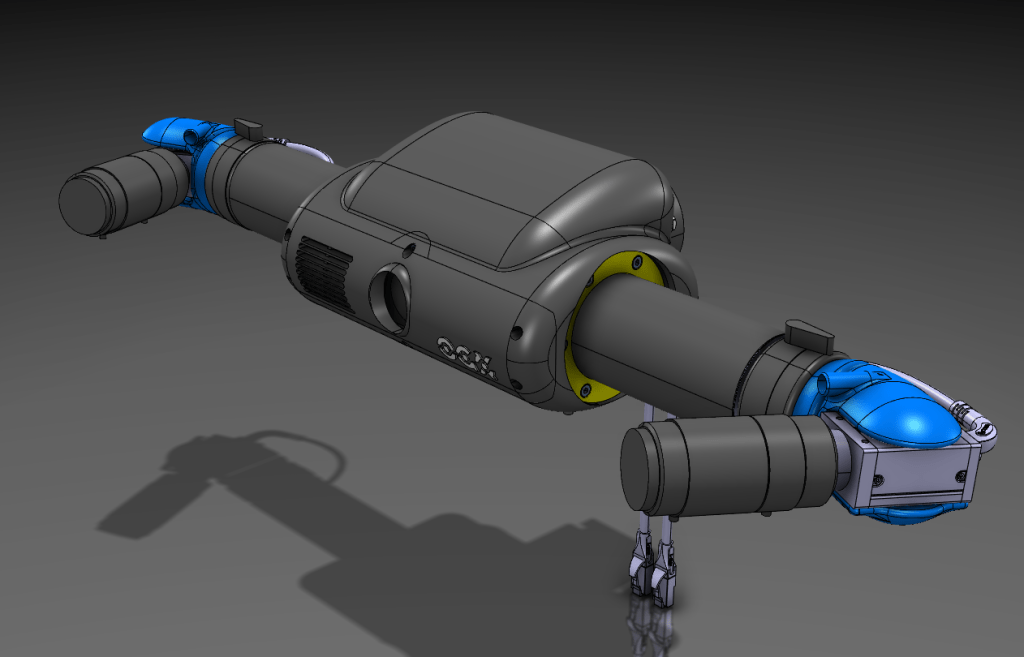
Głowica pomiarowa
Aby spełnić wymagania konserwatorskie (powierzchnie pomiarowe z pigmentami światłoczułymi) nie dopuszcza się emisji promieniowania ultrafioletowego i podczerwonego w kierunku mierzonego obiektu. Zdecydowaliśmy się wykorzystać dostępny na rynku projektor DLP Optoma ze źródłem światła LED. Głowica pomiarowa wykorzystuje 2 kamery 9 Mega Pixel po obu stronach projektora, obserwując ten sam obszar pomiarowy. Pomaga nam to zeskanować błyszczące części obiektu. W większości przypadków, jeśli odbicie lustrzane jest widoczne jedną kamerą, tę samą część należy dobrze zmierzyć drugą. Dodatkowo głowa powinna być lżejsza niż 5kg, aby mogła być łatwo podniesiona przez ramię robota. Do zbudowania ostatecznej wersji urządzenia wykorzystano technologię druku 3D oraz części z włókna węglowego. W urządzeniu wykorzystano metodę kalibracji opisaną w [3], która pozwoliła uzyskać objętość roboczą o wymiarach 200x280x200mm i rozdzielczości 0,1mm, mierzonej jako średnia odległość pomiędzy punktami w przechwyconej chmurze.
Dodatkowy sprzęt oświetleniowy
Łączenie ostatecznego modelu 3D z oddzielnych skanów, z których każdy został zarejestrowany przy innym położeniu głowicy skanera, powoduje niejednolitą kolorystykę ostatecznego modelu. Dodatkowo niektóre specyficzne części chińskiej szafki Kings są wyjątkowo błyszczące, co powoduje nieprzyjemne prześwity widoczne na ostatecznym modelu. Aby uzyskać równomierną jasność modelu, należy zastosować system oświetlenia bezcieniowego, nieruchomego podczas całego procesu digitalizacji. Jest to niemożliwe ze względu na brak miejsca i samozacienienie systemu wynikające z ograniczonej odległości skanera 3D od objętości pomiarowej. Aby rozwiązać ten problem, przechwytujemy obrazy z kilkoma dodatkowymi światłami i przeprowadzamy złożoną procedurę korekcji kolorów na etapie post-processingu modelu. Do wykonania dodatkowych zdjęć wykorzystano 6 źródeł światła LED. 2 mniejsze panele LED przymocowane są bezpośrednio do głowicy skanera obok kamer. Pozycja tych 2 świateł zmienia się w przypadku kamer i projektora DLP. 4 większe panele mocowane są bezpośrednio do podnośnika kolumny pionowej i ułożone w układzie kwadratu o wymiarach 1,2×1,2m. Większe światła znajdują się dalej niż 2 m od aktualnie mierzonej powierzchni i poruszają się dopiero po zmianie poziomu słupa pionowego. Te 4 światła mogą zapewnić stałe warunki oświetleniowe dla wszystkich pomiarów zarejestrowanych w pozycji pojedynczej platformy, z wyjątkiem sytuacji, gdy ramię robota zasłania poszczególne panele. Wszystkie lampy emitują miękkie, rozproszone światło dzienne o temperaturze barwowej 5650K. Dodatkowo mniejsze panele posiadają certyfikat wierności odwzorowania barw oświetlanych obiektów o współczynniku CRI Ra>95.


Rys. Stanowisko pomiarowe – ostateczny projekt
Ścieżka gromadzenia i przetwarzania danych
Poniższa tabela przedstawia przybliżoną liczbę skanów wymaganych do pokrycia całej powierzchni ścian i sufitu szafy. Przy objętości pomiarowej pojedynczego skanu wynoszącej 200x280x200 mm i 50% nakładaniu się kolejnych skanów, zarejestrowano ponad 12000 skanów z 6000 oddzielnych pozycji głowicy.
| kolejne pozycje platformy | 50 | |
| kolumna pionowa różne pozycje (3 poziomy dla każdej pozycji platformy) | 150 | |
| różne pozycje głowic pomiarowych | automatyczna sekwencja (25 na poziom kolumny) | 3750 |
| półautomatyczne dodatkowe pomiary (ok. 15 na poziom kolumny) | 2250 | |
| CAŁKOWITA liczba skanów | 12000 | |
W pozycji pojedynczej platformy ramię robota jest unoszone na 3 różnych poziomach nad podłożem. Na każdym poziomie operator rozpoczyna automatyczną sekwencję z 25 różnymi pozycjami głowic skanujących, obejmującymi obszar ok. 0,8×0,8m. Po zakończeniu sekwencji automatycznej możemy rozpocząć półautomatyczne pomiary części o bardziej skomplikowanym kształcie, w których pojawiły się defekty. Korzystając z algorytmu następnego najlepszego widoku opisanego w operatorze, wystarczy wskazać obszar, w którym należy wykonać kolejne skanowanie. Jeśli obliczona pozycja głowicy pomiarowej jest osiągalna, ramię robota rozpoczyna ruch. Skanowanie rozpoczyna się natychmiast po osiągnięciu żądanej pozycji. Kiedy w końcu zmierzono dolną część szafki, wysunięto kolumnę pionową i proces powtórzono dla górnej części i sufitu szafy. Akwizycja obrazów trwa ok. 20 sekund. Dzięki dodatkowemu czasowi na obliczenie chmury punktów, zapisanie danych, procedurę następnego najlepszego widoku i ruch robota, kolejny pomiar można wykonać po około 3 minutach. Rejestrowane i obliczane są jednocześnie dwa skany, zarówno dla lewego, jak i prawego detektora. Ostatecznie proces skanowania całego gabinetu trwa 8 tygodni i obejmuje około 350 skanów dziennie.
Zapraszamy do obejrzenia filmu podsumowującego wspólne działania podjęte podczas realizacji projektu:
Więcej o szczegółach prac konserwatorskich przeczytać można na stronach Muzeum Pałacu Króla Jana III w Wilanowie http://wilanow-palac.pl/prace_konserwatorskie_w_gabinecie_chinskim_krola.html